Investigadores de la Universidad de Nanjing desarrollaron un sistema robótico que codifica, encripta y ejecuta instrucciones mediante luz, sin electrónica externa
Un equipo de investigadores de la Universidad de Nanjing, China, publicó en la revista Light: Science & Applications un avance que redefine las fronteras de la robótica blanda: un robot completamente flexible capaz de almacenar sus propias instrucciones operativas en forma de hologramas cifrados, decodificarlas mediante luz y ejecutarlas de forma autónoma, sin depender de computadoras externas ni intervención cognitiva humana directa.
El sistema, denominado OISRS (Optically Interactive Soft Robotic System), funciona como un organismo biológico: tiene un módulo de actuación equivalente al sistema muscular y un módulo informativo que actúa como sistema nervioso central, capaz de generar retroalimentación óptica hacia el operador.
El problema que resolvieron
La robótica blanda convencional, diseñada para imitar la flexibilidad y adaptabilidad de los organismos vivos, ha avanzado significativamente en materiales y estructuras. Sin embargo, todos los sistemas existentes dependían de arquitecturas de control externas: hardware, software o razonamiento humano para interpretar y ejecutar comandos. El robot en sí mismo no podía almacenar instrucciones ni comunicarlas.
Zhang et al. resuelven este problema integrando directamente la información dentro del cuerpo del robot.
Cómo funciona: cristales líquidos y seda como plataforma
El sistema combina dos materiales en una arquitectura bicapa:
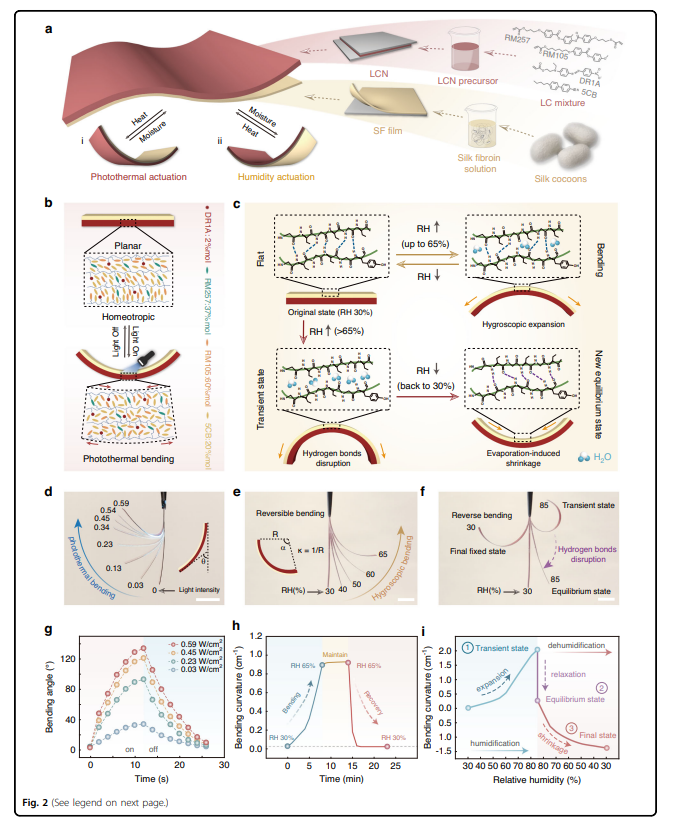
La primera capa está fabricada con redes de cristal líquido (LCN, liquid crystal networks). Los cristales líquidos tienen la capacidad de modular la fase de la luz con gran precisión, lo que permite grabar hologramas de fase directamente en el material sólido mediante un sistema de microlitografía controlado por un dispositivo de espejos digitales (DMD). Al iluminar estos hologramas con luz circularmente polarizada, se reconstruyen imágenes que funcionan como instrucciones visuales para el operador.
La segunda capa es una película de fibroína de seda (silk fibroin, SF), extraída de capullos de gusano de seda Bombyx mori. Este biopolímero es altamente higroscópico, absorbe humedad con facilidad, y puede programarse para adoptar configuraciones tridimensionales específicas mediante exposición a vapor de agua. Además, la seda actúa como matriz huésped para nanopartículas de conversión ascendente (UCNPs, upconversion nanoparticles) dopadas con iones de tierras raras, que emiten luminiscencia de colores ajustables (azul, verde, amarillo, rojo) bajo excitación con láser infrarrojo cercano a 980 nm.
Esta combinación no es trivial. Individualmente, cada material tiene limitaciones: los LCN tienen baja termoplasticidad y actúan en un solo modo; la seda no puede codificar hologramas. Juntos crean una plataforma multifuncional que permite, simultáneamente, actuación en múltiples grados de libertad y multiplexación de información.
El sistema de encriptación cuádruple
El aspecto más sofisticado del sistema es su arquitectura de seguridad. Para demostrar las capacidades del OISRS en escenarios de misión crítica, los investigadores desarrollaron un robot caminante capaz de escapar de un laberinto, cuyas instrucciones de ruta estaban cifradas en cuatro capas secuenciales:
Primera capa: el robot adopta la forma de una flor cerrada. Solo cuando se expone a vapor de agua, la estructura se abre y revela el módulo holográfico subyacente.
Segunda capa: al iluminar con un láser de supercontinuo circularmente polarizado, se proyectan cuatro hologramas distintos desde el disco LCN.
Tercera capa: cada pétalo de la flor emite un color de fluorescencia diferente bajo excitación infrarroja a 980 nm, correspondiente de forma unívoca a uno de los cuatro hologramas proyectados.
Cuarta capa: la secuencia de colores fluorescentes (azul, verde, amarillo, rojo) funciona como clave de descifrado. Con cuatro posiciones y cuatro colores, existen 256 permutaciones posibles (4⁴). Solo la secuencia correcta en el experimento, «RGYB» desbloquea el conjunto de instrucciones de navegación válidas.
Actuación dual: luz y humedad
El módulo de actuación responde a dos estímulos independientes. Bajo irradiación de un láser azul (488 nm), la capa LCN se calienta por efecto fototérmico, supera su temperatura de transición vítrea (~21 °C) y se dobla en dirección a la capa de seda. Este movimiento es reversible y su velocidad aumenta con la intensidad de la luz. El sistema demostró estabilidad durante 100 ciclos de encendido/apagado sin degradación.
Bajo condiciones de alta humedad relativa (superior al 65%), la seda absorbe agua, lo que interrumpe los puentes de hidrógeno entre sus cadenas moleculares y genera una reconfiguración tridimensional permanente que puede fijarse en geometrías complejas. Esta capacidad de memoria de forma permite fabricar actuadores con configuraciones iniciales en hélice, espiral o tipo «H» que luego responden diferencialmente a cada estímulo.
Las demostraciones concretas
El equipo construyó dos prototipos funcionales. El primero es un gripper de cuatro brazos capaz de localizar, agarrar, transferir y soltar un cubo azul guiado únicamente por la instrucción holográfica proyectada desde su propia base: «atrapa el cubo azul y ponlo en la caja azul». La instrucción está codificada en el cuerpo del robot; el operador la descifra visualmente y ejecuta la tarea manipulando la iluminación.
El segundo prototipo es el robot caminante con encriptación cuádruple descrito arriba. Con una masa de 14,2 mg, 1,5 cm de longitud y 5 mm de alto en estado cerrado, puede desplazarse en cuatro direcciones a una velocidad máxima de ~1,33 mm/s bajo estimulación periódica con láser. En el experimento, navegó con éxito un laberinto tras descifrar las cuatro capas de instrucciones encriptadas.
Lo que hace que este sistema sea filosóficamente inquietante va más allá de la ingeniería: la bicapa LCN/seda replica, con matemáticas y polímeros, el comportamiento exacto de un músculo biológico. La capa de cristal líquido se contrae y expande ante la luz igual que una fibra muscular ante un impulso nervioso; la seda de Bombyx mori, un material que el gusano produce para protegerse, cambia de forma ante la humedad igual que el tejido conectivo ante los fluidos corporales. El movimiento no surge de circuitos ni de código: surge de geometría molecular. Y eso desmonta silenciosamente una intuición que dábamos por sentada: que el movimiento biológico era especial porque venía de la vida. Aquí viene de la física. La frontera entre máquina y organismo resulta ser más delgada de lo que pensábamos.
Implicaciones y limitaciones
Los investigadores apuntan a tres aplicaciones estratégicas. En medicina de precisión, el sistema podría operar dentro del cuerpo humano en entornos donde los dispositivos electrónicos son impracticables, como procedimientos guiados por resonancia magnética, con el robot anclándose en tejidos por morfología húmeda, verificando su identidad mediante fluorescencia cifrada y ejecutando liberación de fármacos o manipulación de tejido bajo comando holográfico.
En operaciones de misión crítica con requisitos de confidencialidad, la arquitectura de encriptación óptica multistrato ofrece una alternativa segura a los sistemas de control electrónico, que son vulnerables a interferencias electromagnéticas e interceptación de señal.
En microrobótica óptica interactiva, la capacidad de controlar hologramas de fase a escala microscópica abre la puerta a sistemas de control completamente ópticos para robots de tamaño celular.
Sin embargo, los autores reconocen limitaciones sustanciales. Las longitudes de onda de actuación de los LCN deben optimizarse hacia las ventanas de transparencia biológica (NIR-I o NIR-II) para reducir el daño tisular en aplicaciones médicas. Alternativamente, la interacción óptica podría implementarse mediante fibras ópticas o endoscopios que lleven la luz directamente al sitio objetivo. La integración con sistemas de retroalimentación sensorial en tiempo real, que permitiría cerrar completamente el bucle de autonomía, sigue siendo una tarea pendiente.
El estudio fue financiado por el Programa Nacional de I+D de China y la Fundación Nacional de Ciencias Naturales de China, y fue publicado el 6 de mayo de 2026 en Light: Science & Applications (DOI: 10.1038/s41377-026-02287-5).


